Разделы сайта
- Главная
- Исследования и анализ современных технологий
- IP-телефония
- Антенно-фидерные устройства
- Виртуальное построение рабочей локальной сети
- Влияние электромагнитного поля на подземную проволочную антенну
- Микрополосковая антенная решетка
- Система экологического мониторинга вредных газовых выбросов
- Организация процесса производства цифрового телевиденья
Классификация и общие принципы

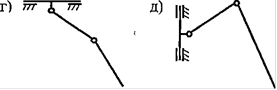
Рис. 5. Схемы шагающих движителей: телескопическая (а), ортого- нальнальная (б), пантографная (в), «лошадиная» (г), инсектоморфная (д)


Рис. 6. Цикловые механизмы шагания: 4-х звенный (а); 4-х звенный с измененяемым положением оси коромысла (б); 6-ти»звенный (в); 4-х звенный с корректором закона вращения кривошипа (г)
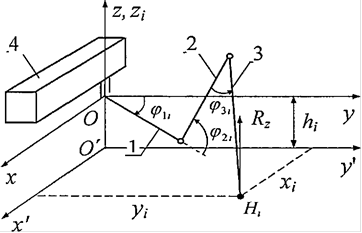
Рис. 7. Кинематическая схема инсектоморфного механизма шагания:
, 2, 3 - звенья механизма шагания, 4 - корпус машины
Самое читаемое:
Следящий электропривод
Автоматизация процессов управления различными
объектами связана с широким использованием следящих приводов. Следящие приводы
нашли применение во многих областях техники: в системах управления станками, в
системах управления манипуляторами, в моделирующих стендах, в системах
управления объектами вооружения и т. д.
Следящий электро ...