Разделы сайта
- Главная
- Исследования и анализ современных технологий
- IP-телефония
- Антенно-фидерные устройства
- Виртуальное построение рабочей локальной сети
- Влияние электромагнитного поля на подземную проволочную антенну
- Микрополосковая антенная решетка
- Система экологического мониторинга вредных газовых выбросов
- Организация процесса производства цифрового телевиденья
Охрана труда.
{= getch();(c)
{27: eoj = 1; break;'w':(ExecCommand("StepFwd")!=E_OK)("\n*** Exec command error\n");;'a':(ExecCommand("StepLeft")!=E_OK)("\n*** Exec command error\n");;'d':(ExecCommand("StepRight")!=E_OK)("\n*** Exec command error\n");;'s':(ExecCommand("StepBack")!=E_OK)("\n*** Exec command error\n");;'r':("start.hxs");;
}
}
}
}
Краткое руководство пользователя
1. Включаем связь с роботом
2. С помощью кнопок "Сигнал" можно проверить работоспособность контроллеров: при нажатии должен раздаться звуковой сигнал от каждого
. Перемещая ползунки, настраиваем положение ног робота
. Когда все выставлено, нажимаем "Запомнить углы".
. После того, как выставлены основные положения, заходим в файл xpd.lst, для просмотра и условного обозначения координат
<macro>
;
0 w 6 27 -44 -3 45 -44 -3
0 w 6 -27 44 3 -45 44 3
#
Первые три числа - координаты точек передней левой лапки, в название так и зафиксируем, левая передняя бок поставить
6. Включаем связь с роботом
7. Включаем 2 контроллера, должен раздаться звуковой сигнал от каждого
. Перемещая курсор, настраиваем положение каждой ножки робота
. Когда все выставлено, нажимаем «Запомнить углы».
. После того, как выставлены основные положения, заходим в файл xpd.lst, для просмотра и условного обозначения координат. Первые три цифры - координаты точек передней левой лапки, в название так и зафиксируем, левая передняя бок поставить.
. В файле wnp.mdf делаем описание всех движений.
. Пример фрагмента mdf файла
; Команды
; имя макроса
; командная строка 1
; командная строка 2
; .
; командная строка N
; #
0 p 0
#
0 p 0
#
0 p 0
#100010001000
#
;wait 1 0
;wait 2 02000
#
;-----------------------------------------------------------
0 a 0
#
0 a 0
#
0 a 0
#
#
;-----------------------------------------------------------
ВсеИсхПоложение
0 w 6 0 0 0 0 0 0
0 w 6 0 0 0 0 0 0
0 w 6 0 0 0 0 0 0
#
;-----------------------------------------------------------
; ЛЕВАЯ ПЕРЕДНЯЯ НОГА
;-----------------------------------------------------------
ЛПИсх
; исходное положение
0 w 3 0 0 0
#
ЛПисходУпор
0 t 2 1 -50
0 t 2 2 15
#
. Пример hxs файла
;-------------------------
; Иванов Н.В.
; 6-ногий робот
; Ходит, загребает немного
;-------------------------
; Ноги в исх положение
ВсеИсхПоложение2000
;-------------------------
ЛПисходУпор
ЛСисходУпор
ЛЗисходУпор
ППисходУпор
ПСисходУпор
ПЗисходУпор
;-------------------------
ППвпередВверх
ЛСбокВверх
ПЗисхЛапверх
ЛПназадУпор
ПСназадУпор
ЛЗназадУпор
ППвпередУпор
ЛСвпередУпор
ПЗвпередУпор
ЛПИсх
ПСИсх
ЛЗИсх
ППназадУпор
ЛСназадУпор
ПЗназадУпор
ЛПисходУпор
ПСисходУпор
ЛЗисходУпор
7. Чертежи макета
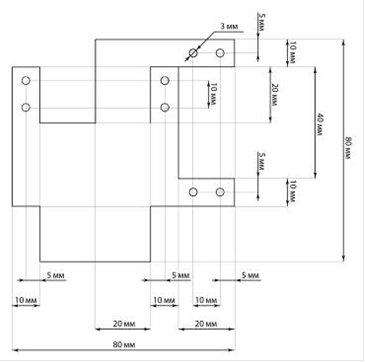
Рис 1 Крепеж
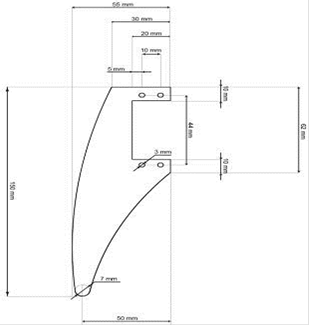
Рис 2 Нога
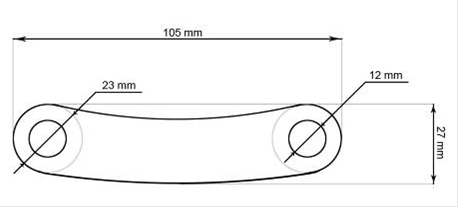
Рис 3 Плечо
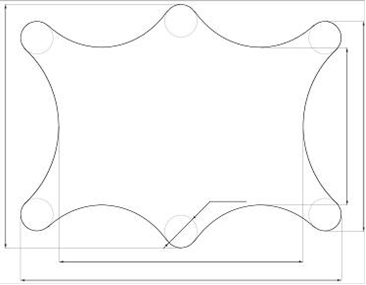
Рис.4 Корпус
. Протокол внутренней связи контроллера
Самое читаемое:
Лампы СВЧ диапазона
К лампам СВЧ диапазона можно отнести лампу бегущей волны и лампу обратной
волны. Эти лампы относятся к электровакуумным приборам СВЧ диапазона. Эти лампы
в основном применяются для усиления сигналов СВЧ.
...