Разделы сайта
- Главная
- Исследования и анализ современных технологий
- IP-телефония
- Антенно-фидерные устройства
- Виртуальное построение рабочей локальной сети
- Влияние электромагнитного поля на подземную проволочную антенну
- Микрополосковая антенная решетка
- Система экологического мониторинга вредных газовых выбросов
- Организация процесса производства цифрового телевиденья
Цифровой и импульсный ввод данных

Рисунок 13. Динамический ввод данных, если число источников прерывания не превышает 2-х
Если число источников прерывания велико, т.е. превышает число входов прерывания контактора, то выходы датчиков могут объединяться с помощью логики “ИЛИ” для получения общего для всех источников сигнала прерывания.
Недостаток: одинаковый приоритет всех источников прерывания, поэтому для определения реального источника подавшего запрос прерывания в подпрограмму обработки прерывания через порт ввода читается состояние всех датчиков.

Рисунок 14. Динамический ввод данных, если число источников прерывания больше 2-х
Цифровой ввод обычно осуществляется через порт ввода УМК в регистр внешнего устройства и процедура аналогична записи операнда в ячейку памяти внешнего ОЗУ.
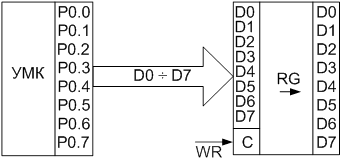
Рисунок 15. Цифровой вывод данных
Если число внешних устройств велико, то входы всех внешних регистров объединяются на общую шину данных контроллера и запись информации в них осуществляется путем демультиплексирования выходной шины данных.

Рисунок 16. Цифровой вывод о нескольких внешних устройств
Процедура демультиплексирования осуществляется подачей сигнала разрешения Е со второго порта УМК на один из регистров, после чего данные D0-D7 записываются в регистр.
Импульсный ввод информации осуществляется по отдельным разрядам порта ввода. При этом формирование сигнала управления может производиться по отдельным битам портов, либо в виде группы логически взаимосвязанных битов (в виде полного байта), например для управления тиристорами.
Импульсные сигналы используются для управления:
а) исполнительными двигателями типа шаговых;
б) коммутационной аппаратурой (реле);
в) силовыми полупроводниковыми ключами (тиристорами, транзисторами);
г) индикаторными устройствами (лампа, светодиод);
д) элементами цифровой логики, расположенными на объекте.
Как и при вводе данных различают:
) статический вывод, когда выдаваемый сигнал храниться в регистре порта до тех пор пока в него не будет записано новое значение;
) динамический вывод, когда выходной сигнал появляется на короткий интервал времени, а реальная продолжительность сигнала управления исполнительного устройства задается отдельной внешней схемой задержки времени.
Буфер - элемент согласования выходных параметров поров УМК с параметрами управления исполнительного органа, при этом происходит согласование по току и по напряжению, выходному сопротивлению.
Для IGBT и МОП транзисторов существуют драйверы управления (содержат встроенную защиту, позволяющую поднимать уровень напряжения).

Рисунок 17. Импульсный вывод данных
Самое читаемое:
Разработка отладочной платы устройства для отладки микроконтроллеров
Микроконтроллер предназначен для управления различными электронными
устройствами и осуществления взаимодействия между ними в соответствии с
заложенной в микроконтроллер программой. В отличие от микропроцессоров,
используемых в персональных компьютерах, микроконтроллеры содержат встроенные
дополнительные устройства. Эти устройства вы ...